科学怪人z 发表于 2015-4-6 10:59
1. rate模式里调整. 使用默认PIDs和默认looptime.起飞悬停看看你的多轴是如何反应的. 如果不稳的话,那么需 ...

 第一页新手的话上面一块用初始值 手动稳定比例就是p,积分就是i,微分就是d,按照教程调。
第一页新手的话上面一块用初始值 手动稳定比例就是p,积分就是i,微分就是d,按照教程调。科学怪人z 发表于 2015-4-6 11:10
第一页新手的话上面一块用初始值 手动稳定比例就是p,积分就是i,微分就是d,按照教程调。
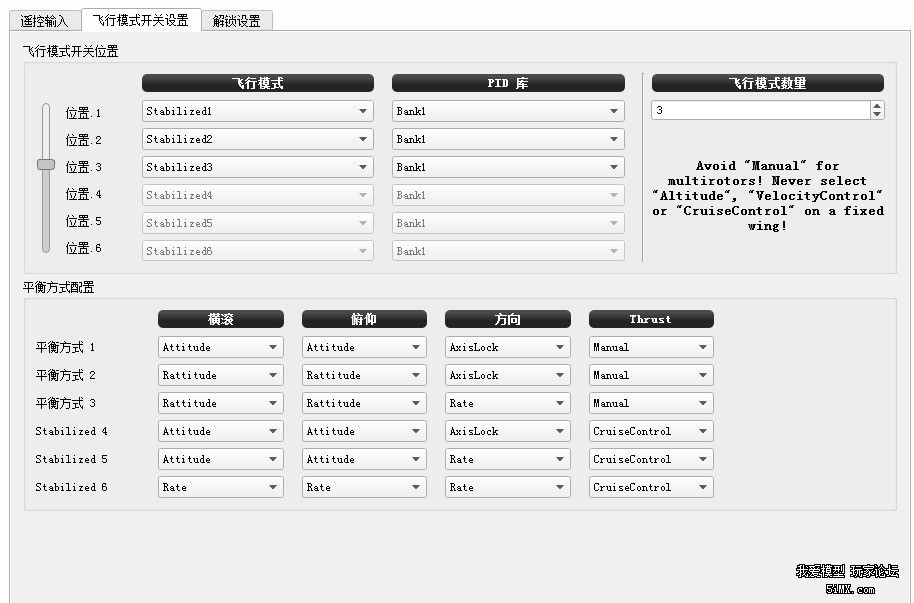
姿态稳定切记 ...

songcolour 发表于 2015-4-6 11:36
大哥 挂了张图片
借的图片 额还有,本人今年才上初二songcolour 发表于 2015-4-6 11:45
这次我是真正的明白了 真的非常感谢。。。 再次感谢
科学怪人z 发表于 2015-4-6 11:44
借的图片 额还有,本人今年才上初二
songcolour 发表于 2015-4-6 11:47
最后请问 您的 将looptime降低到3000 这一句 looptime 这个在哪呢?
| 欢迎光临 5iMX.com 我爱模型 玩家论坛 ——专业遥控模型和无人机玩家论坛(玩模型就上我爱模型,创始于2003年) (http://wz.5imx.com/) | Powered by Discuz! X3.3 |