5iMX.com 我爱模型 玩家论坛 ——专业遥控模型和无人机玩家论坛(玩模型就上我爱模型,创始于2003年)
标题:
画了一个兼容 APM ArduCopter 3.2.1 的飞控,原理图、PCB、固件、Mission Planner.
[打印本页]
作者:
skypup
时间:
2018-5-20 00:17
标题:
画了一个兼容 APM ArduCopter 3.2.1 的飞控,原理图、PCB、固件、Mission Planner.
本帖最后由 skypup 于 2018-5-20 00:23 编辑
如题。
ArduCopter 3.2.1 与 Mission Planner 1.3.21 都是很古老、可能是已经被淘汰掉的,但是代码比最新版本简单许多,有兴趣跳入 Pixhawk 这个大坑的同学,可以尝试着做一做,研究一下。
我没有绑定手机号,居然又可以发贴子了。
原理图:
分成了4块板子,第一块是 Mega2560 核心板的。(点击看大图)
(, 下载次数: 16)
上传
点击文件名下载附件
第二块是给飞控供电的 5V DC-DC电路、测电压,使用的芯片与好盈 3A BEC 一样,都是 MP1593.
(, 下载次数: 40)
上传
点击文件名下载附件
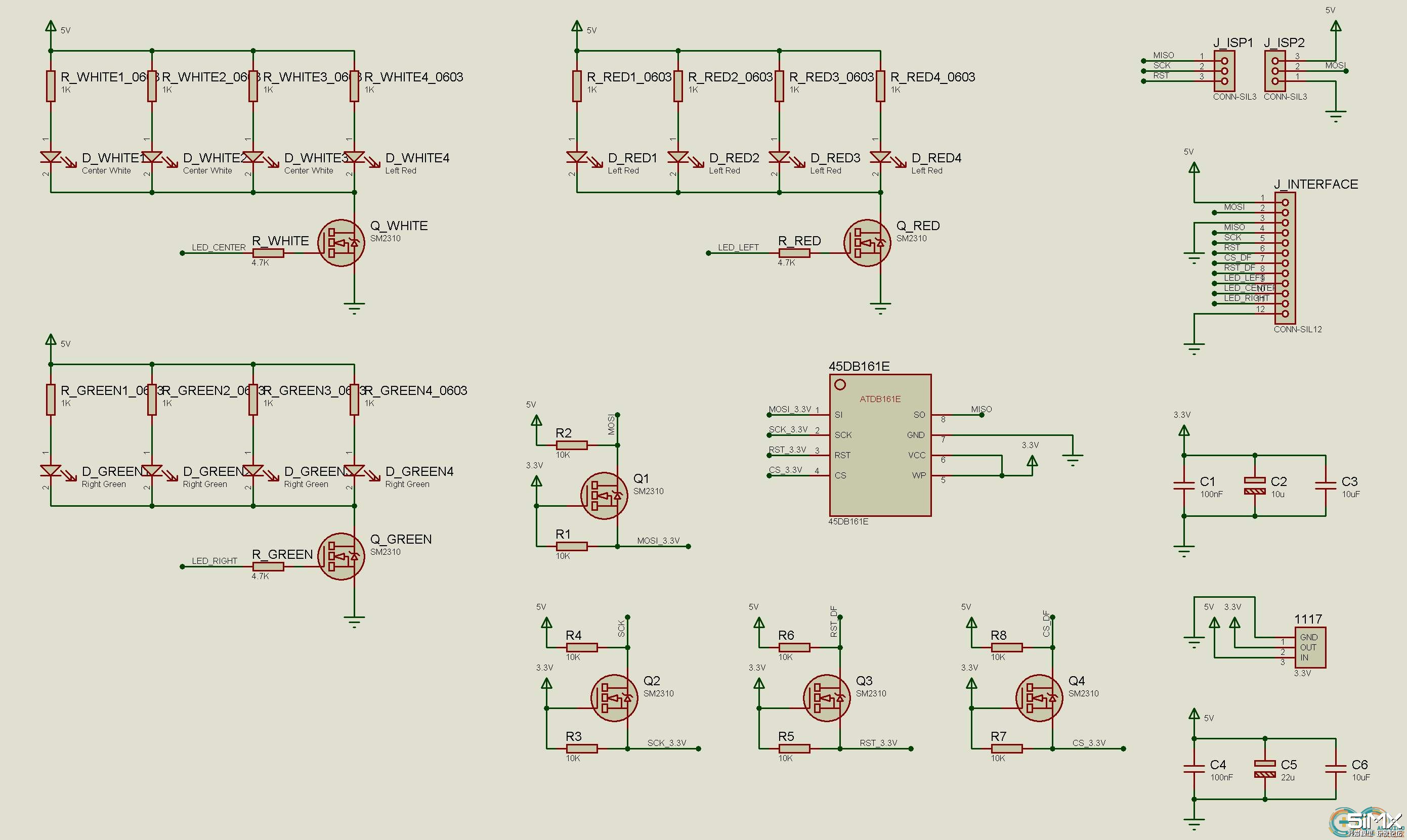
第三块是日志内存与 LED 灯。
(, 下载次数: 18)
上传
点击文件名下载附件
第四块是传感器的板子。
(, 下载次数: 14)
上传
点击文件名下载附件
传感器的板子画的有点浪,请以下面的图为准。有些元器件是不要焊的。
(, 下载次数: 12)
上传
点击文件名下载附件
作者:
skypup
时间:
2018-5-20 00:24
PCB:
(, 下载次数: 28)
上传
点击文件名下载附件
(, 下载次数: 19)
上传
点击文件名下载附件
(, 下载次数: 22)
上传
点击文件名下载附件
(, 下载次数: 35)
上传
点击文件名下载附件
作者:
skypup
时间:
2018-5-20 00:27
焊好之后的:
(, 下载次数: 17)
上传
点击文件名下载附件
(, 下载次数: 25)
上传
点击文件名下载附件
上图是 5V BEC,纹波与噪声看上去似乎还不错,不会影响传感器。
(, 下载次数: 14)
上传
点击文件名下载附件
(, 下载次数: 26)
上传
点击文件名下载附件
传感器的板子有2个芯片不好焊。
(, 下载次数: 25)
上传
点击文件名下载附件
作者:
hzbhyl
时间:
2018-5-20 07:42
哇,
作者:
qdliujie
时间:
2018-5-20 09:14
火前留名
作者:
醉生梦死233
时间:
2018-5-20 12:08
楼主厉害,方便加个qq吗
作者:
itsme
时间:
2018-5-20 12:25
非常棒!!!
作者:
xp716
时间:
2018-5-20 17:10
高端玩家,造福模友
作者:
wcdsxm
时间:
2018-5-21 14:57
全部模块化???四个单独的模块组成的,到那时感觉稍微有点大,再小点就好了
作者:
skypup
时间:
2018-5-21 19:05
wcdsxm 发表于 2018-5-21 14:57
全部模块化???四个单独的模块组成的,到那时感觉稍微有点大,再小点就好了
IMU传感器模块单独画一个板子,是为了做内减震。
5V供电模块单独画,是因为看到 APM 或者 Pix 的电流计都是独立一块板子,有可能是为了避免电感对地磁传感器的干扰吧。下一步我打算把 5V 供电模块与飞控MCU整合到一块板子上。
日志与 LED 独立出来,是因为我对 45DB161 这个芯片不了解。下一步这个就集成到MCU一块板子上面了。
LED 灯如何处理还没有想好,大家多给点儿建议吧。
板子画的是挺大的,我会努力减小尺寸。
打算把 IMU 传感器板子的尺寸减小,改为直接由主控板提供 3.3V 电,不再需要 1117 3.3V 的电路。
另外的3个板子整合为1板。这样 PCB 打样的费用就少很多了。
作者:
ccclong
时间:
2018-5-21 22:21
要能全部集成到一个板子上的正反面, ,那就能商业出货了。期待。
作者:
skypup
时间:
2018-5-23 19:38
关于 LED 灯的电阻,修正一下:
LED 灯的颜色,建议遵循“左红、右绿、中间白”的约定。
对于红色LED,限流电阻选 150R 左右的。
对于绿色LED,限流电阻选 5K 左右的。
对于白色LED,限流电阻选 1K 左右的。
作者:
skypup
时间:
2018-5-30 14:53
对 5V 稳压模块做了测试,由进口 MP1593 与国产 DC-DC 对比。
纹波 MP1593 是 0.050V,国产 DC-DC 是 0.049V. 这个误差可以忽略不计,所以认为纹波是无明显区别的。
X与Y轴的振动 MP1593 是 ±0.3 国产 DC-DC 是 ±0.4,看数据似乎 MP1593 好一些,但是考虑到数值(官方推荐的是 ±1.0)本身就不大,所以判断这个区别可以忽略。
Z轴的振动都是 ±0.4 ( -9.4 ~ - 10.2),是一致的。
综上,判断这2种模块,都是合适的。
电压:
MP1593
(, 下载次数: 28)
上传
点击文件名下载附件
国产 DC-DC
(, 下载次数: 30)
上传
点击文件名下载附件
振动:
MP1593
(, 下载次数: 29)
上传
点击文件名下载附件
XY 轴的:
(, 下载次数: 19)
上传
点击文件名下载附件
Z 轴的:
(, 下载次数: 23)
上传
点击文件名下载附件
国产 DC-DC:
(, 下载次数: 31)
上传
点击文件名下载附件
XY 轴:
(, 下载次数: 11)
上传
点击文件名下载附件
Z 轴:
(, 下载次数: 17)
上传
点击文件名下载附件
在另一个测试下,国产模块在连接4个 EMax 9 克舵机时,电压波动满足 4.5V ~ 6.0V 的要求;而 MP1593 (同时也测试了使用 MP1593 的好盈 3A BEC),有极端情况下电压会低于 4.5V,所以,5V 稳压模块将替换为国产DC-DC.
作者:
eee987
时间:
2019-12-28 14:02
记录一下,慢慢看
作者:
windyskys
时间:
2020-3-29 23:53
现在还在研究吗?
欢迎光临 5iMX.com 我爱模型 玩家论坛 ——专业遥控模型和无人机玩家论坛(玩模型就上我爱模型,创始于2003年) (http://wz.5imx.com/)
Powered by Discuz! X3.3