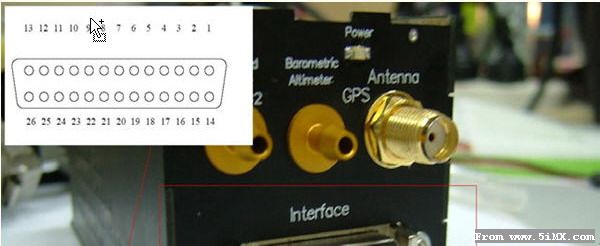
iFLY40s 标准版的54 针舵机接线板,为自驾仪的安装连接提供了快速方便的方式。
飞控功能:
稳定姿态,爬升和俯冲
航向、高度稳定控制
支持手掷、弹射和滑跑起飞注3
支持伞降、深失速降落和滑跑降落注4
支持多种固定翼舵面布局,支持飞艇,4 路舵面舵机输出可任意混控,也可以映射到5 路任务舵机输出。
支持10 路舵机的关键点定义,包括发动机怠速、巡航和爬升;可预存6 种机型的舵机初始参数。
个PID 飞控通道,分别是滚转通道、俯仰通道、方向舵航向通道、副翼航向通道、航向侧偏距通道、高度通道、速度通道,支持按速度分段控制,3 段数字式PID
全面支持不着陆参数调整,可通过广播方式依次调整2~16架飞行器参数,适合批量调试。
强大的不着陆实时数据记录和分析功能。自驾仪自带4M 数据存储器,可记录2 小时基本飞行数据。借助9600bps 空中波特率以上的数传链路和ADJ200 的在线示波器功能,可以
实时显示5Hz 的三轴姿态曲线,方便科研试飞并获得宝贵的试验数据。
导航功能:
通过GCS300 地面站软件,自驾仪可预存储30 条航线,每条航线144 个航路点;其中21~30 航线为制式线,26~30 为出厂设置制式航线,分别为圆形、正方形、矩形、8 字型和梳状航线。
最多可分时控制16 个无人机,一个地面站可通过网络向另外15 台地面站发送数据,实现飞行状态的多终端远程监控。
飞行中可更换航线和更改飞行参数。
支持UAV/RPV/RC 三种飞行模式,同时内部具有9 种调试模式,用户可定制自己需要的特殊模式。
支持以下波特率:1200、2400、4800、9600、19200、38400、57600、115200bps。
支持控制杆功能。
支持MapInfo 格式数字地图和位图格式标定的地图。
支持8 个用户遥测信息帧,每帧可变长度,可在界面上扩展用户功能。
5 路任务舵机可预编程,实现遥控开闭、开启—延时关闭、
想要自驾仪使用手册的请到这里!要不太散了我发不过来!谢谢!
请到下面这个帖子里给我E-mail
http://bbs.5imx.com/bbs/viewthread.php?tid=246600&extra=page%3D1