
szlbrf 在 2005-7-28 10:40 AM 发表:
楼主说的有问题
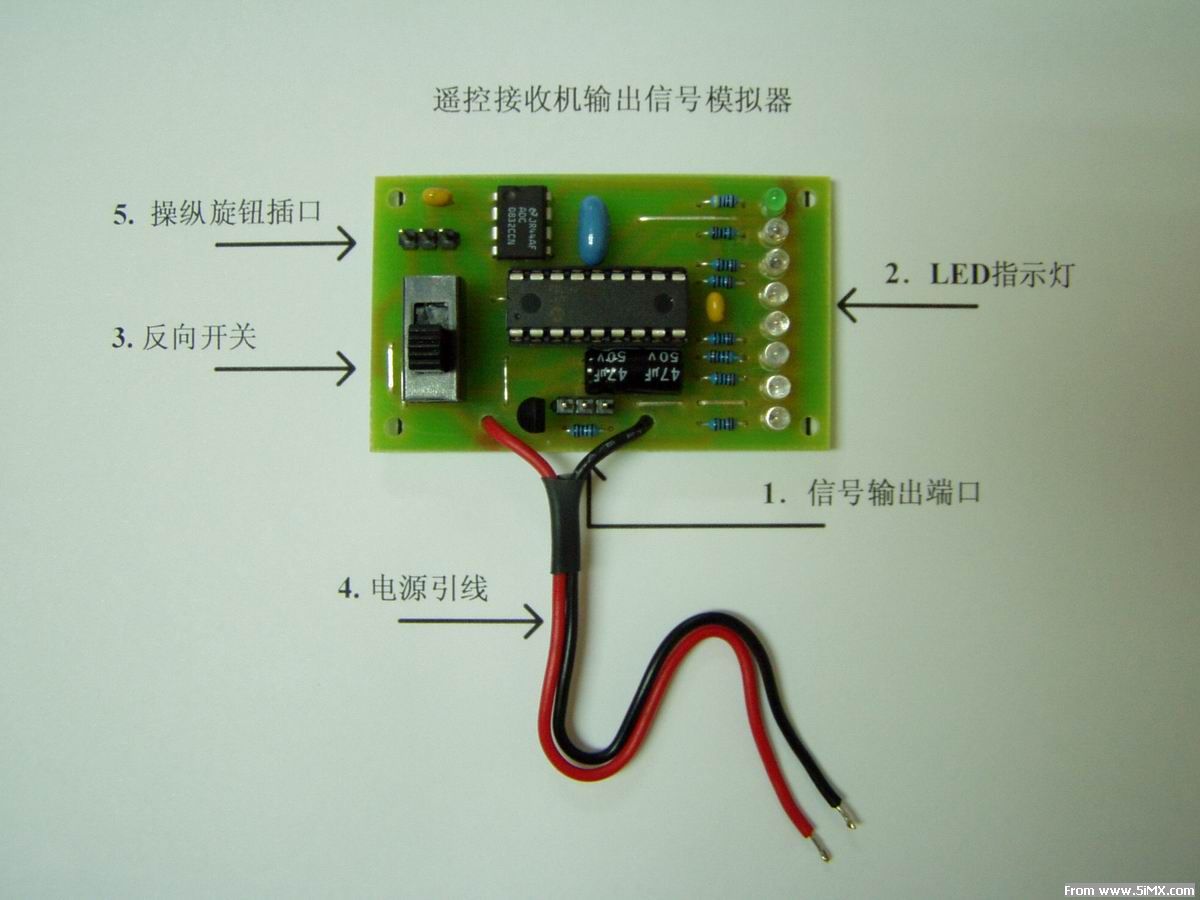
PPM 信号格式:周期2ms 高电平0.7---1.7ms变化 ,低电平0.3ms不变。
中点时:周期1.5ms,高电平1.2ms ,低电平0.3ms
icefire 在 2005-7-31 12:03 PM 发表:
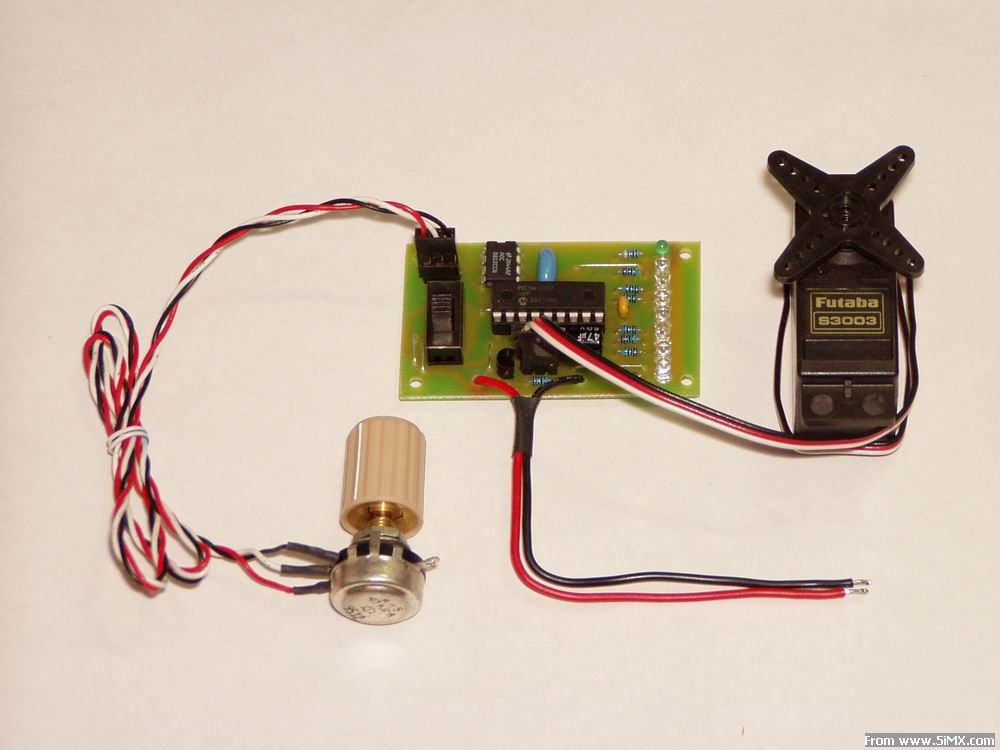
是16F84控制的吗?
su-29 在 2005-7-31 07:51 PM 发表:
俺可以用单片机同时控制16个舵机,哈哈.
原帖由 su-29 于 2005-7-31 19:51 发表
俺可以用单片机同时控制16个舵机,哈哈.
原帖由 djmodel 于 2005-8-4 23:04 发表
16个?是同时刷新么?间隔多少毫秒?应该是宏观同时吧!微观不可能同时地说!
:em15:控制量还可增加!我的现有设计可以到32个!不过我不需要那么多只需要12个:em19:,如果需要的话可随意加!:em15:
其实舵机控 ...
原帖由 XQY1972 于 2005-8-5 09:22 发表
控制普通舵机的脉冲信号的周期最小可以做到多少ms?
| 欢迎光临 5iMX.com 我爱模型 玩家论坛 ——专业遥控模型和无人机玩家论坛(玩模型就上我爱模型,创始于2003年) (http://wz.5imx.com/) | Powered by Discuz! X3.3 |