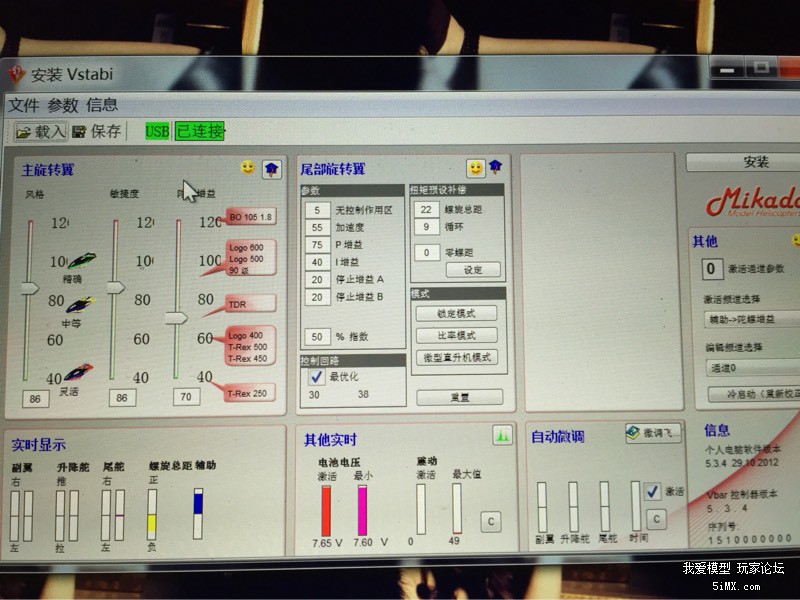
Jeamy 发表于 2015-10-2 11:13 感谢解答,我现在螺距12 |
 来自安卓客户端
来自安卓客户端
qq732007724 发表于 2015-10-1 23:52 见你说的,应该是新机,没炸过就没震荡超标之说,为什么跟螺距有间,给你个解释:螺距影响电机负荷,螺距过大,那么主桨功角过重电机负荷过重,反向力矩会增大,尾桨无法承受,因为力矩持续,使陀螺出现误差,飞机将缓慢左转头。 而你的情况相反,螺距过小,电机负荷过轻,因此尾桨产生的矫正力大于反向力矩,轻松右转过头,此时陀螺介入,就出现摆尾现象了。 |
qq732007724 发表于 2015-10-2 01:12 入【菜單】,懂入去嗎? 找 GYRO SENSE ,就是, 當你見到最頂有 INH 字,即是被禁用了,要轉為 ON , 同時, 見STD 字的地方,轉它為 GY, 轉感度正數,會出現 AVCS 即鎖定模式,見負數,會出現 NORM 即非鎖定模式 調 AVCS 先調高一點,如果有金魚尾,再慢慢調低, 看 SW ← 後面附有一英文字的,就是代表那個開關控制,A 字就是 A 開關, 摸一下上面的開關,打上打下,就會見到有個 UP 或 DWN 出現的了,就是那開關控制感度的轉換, 如果 AVCS 是在 UP 的,那把開關轉做 UP ,那即是鎖定模式開始起作用, 要說的實在太多,你自己研究吧 |
qq732007724 发表于 2015-10-2 00:03 是的, 而遙控器也同時要開啟的, 你看一下說明書,你是甚麼遙控器,尾陀感度是怎樣設的, 應該同樣有AVCS 鎖定模式的 -------------------------------- 你先調好了機械部份的,然後才設置感度 |
bbqcssc 发表于 2015-10-1 23:54 现在震动感觉还可以 ,不安装桨 满油400多一点震动 |
|
尾巴如果机械上面没有问题,出现这种情况 基本上只要把感度提高或者降低就行了 还有就是机身的震动 总之要先排震 如果机体没有问题,那就换个k8试试 |
本帖最后由 coolman8 于 2015-10-1 23:55 编辑  重新調整尾部拉杆, 重新調整尾部拉杆,遙控器上的所有尾部微調歸零, 用拉杆調到中立點,(調整球頭,使拉杆變長或短) 慢的金魚尾就提高感度,用鎖定模式 AVCS ,別用非鎖定模式, 快的金魚尾就調低感度, |
|
正确做法:螺距曲线比例提高,降转速,再降少许尾旋感度。 |
|
用鐵棒打砸 K8 就會正常的了 |
sinny88 发表于 2015-10-1 22:30 尾巴全套拆装好几次了,最后全换新了,还是没有解决,也很顺滑 |
来自安卓客户端|
建议先解决尾巴机械顺滑度,个人经验,绝大部分这种情况都是机械原因造成。 |
 /1
/1 
 收藏
收藏

