|
这个最简单的做法就是单片机编程了,使用步进电机。根本不用接近开关啥的。这东西最不好做的我觉得就是步进电机的传动部分 |
|
可以用两个不同极性的霍尔, A B 杆上粘不同极性磁铁。控制用PLC 或单片机编程。 |
grzsn 发表于 2017-10-11 22:50 多谢大神多谢大神,懂了,这下都懂了. |
fchtvcwt 发表于 2017-10-11 22:23 如果用全部用步进电机还有上位机的话就不用限位了,通过脉冲数可精确控制位置,比如a走了500个脉冲,b同样走500个脉冲就肯定在你要求的精度范围内重合了,当然需要有个开关确定起始位置,比如在12点位置放个开关,控制a转动碰到12点位置,确定零位,在把a移走,转b也碰到同一个开关确定b零位,然后看你的系统设计,1圈是多少个脉冲,通过这个脉冲数可正转,反转精确定位a和b的360度任意位置,并且这个角度对上位机来说是可算出的。在a上装限位开关的方案同样能达到重合的目的,但是a和b的角度不可知,而且不能找到最短路径重合,不如第一种方案。限位开关选择上我建议机械式开关,便宜,非接触式开关可靠性高一些,使用寿命长,没机械磨损,但对于你这个非工业自动化的系统,没必要,而且你这个也不是长期连续工作,找最便宜的就够了。比如干簧管都可以,1,2块钱,加个磁铁。霍尔,光电类没必要,而且工业用的机械限位开关也很贵。 |
grzsn 发表于 2017-10-11 20:53 多谢大神指点. 再请教大神:限位开关有多种,如果用上位机控制两套步进电机驱动器,那么选哪种限位开关更可靠?磁铁配霍尔还是直接用微动?或是接近? |
fchtvcwt 发表于 2017-10-11 19:51 在a上装个限位开关,b转到a位置碰到开关就停止,预留微调,通过调整开关位置可准确重合 |
|
1.选用普通减速电机你需要检测位置,做位置闭环控制,选用步进电机可以开环控制,不需位置反馈(除非高精度要求),所以这个选择跟你的控制系统有关系。 2如果两个电机都选步进电机的话就不需要位置开关,通过脉冲数控制精度肯定超过你的要求。如果是普通电机的话,0.5mm的要求都能达到,选你方便的,只要在安装时预留微调,调整重合度。光电编码器也是一个方案,分辨率高低都有。 |
本帖最后由 fchtvcwt 于 2017-10-11 19:53 编辑 傻孑亥 发表于 2017-10-11 08:31 在火pao模型的应用上,还是用涡轮蜗杆实现比较好,直接就解决了角度自锁的难题. 现在主要没搞懂的就是当炮口指向确定,也就是A臂角度固定后,装弹机B臂如何准确的找到A臂的位置. |
pz02010 发表于 2017-10-11 00:40 舰炮的炮口指向,和跟随炮口指向的自动装弹机................ 我是不是说漏了什么......... |
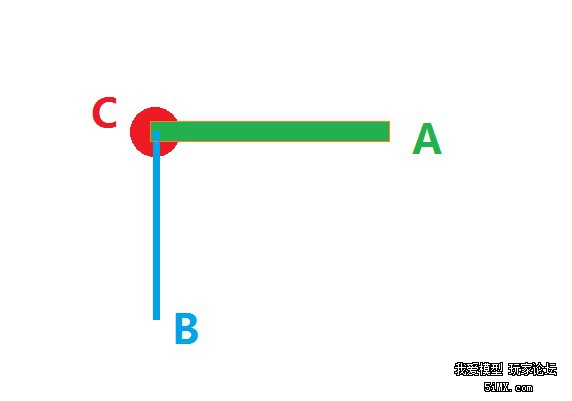
s8702623 发表于 2017-10-11 09:30 多谢大神提醒,是我疏忽了.没在图上说明清楚. A臂与B臂只是在放向上在同一轴线上,其实是两个分开的运动体,可以理解为钟表的时针与分针. |
|
a b 同轴,你如何实现 不同步的速度的?我知道可以前后两个方向布置螺杆,我就是好奇你怎么实现的 |
|
如果不是圆周运动的话,可以用摇臂连杆驱动两根杆运动,C点作为固定轴、 |
|
不好理解,能有专门的应用带入一下不? |
 /1
/1 
 收藏
收藏
