fobyellow 发表于 2022-6-6 13:37 好的,谢谢指点,我再去尝试下. |
欢迎继续阅读楼主其他信息
|
1、惯量比可以去松下的官网下载一个松下的伺服调机程序,按照步骤把丝杆直径长度、工作台重量输入进去就可以获得机械部分的惯量,然后去台达的说明书查您用的电机型号的转子惯量,这两个值一除就是您要的惯量比 2、Z轴的带宽调不起来的原因是两个运动方向的增益值是不一样的,再高档点的驱动器会有Z轴重量补偿,如果A2没有这个功能可以尝试1、配重。2、使用1:3-1:5的减速机,可以把这个问题的影响缩小到1/9-1/25。 3、伺服系统的参数调整验收标准是1、设定需要的(最终的雕刻速度)加减速度和最终速度。2、在噪声可控的条件下尽量增加带宽。3、最终的验收标准是运行跟踪误差,这个值越小越好。 4、光滑的影响原因很多,理论上带宽越高的伺服系统只会增加颗粒感(前提条件是不超调,毕竟可以实现的细节增加了),带宽越低的系统越光滑 |
湖湖 发表于 2022-6-5 18:42 就是刀纹有点明显,用手一摸能明显感觉到,之前我用步机雕的,虽然表面刀纹也有,但是用手一摸表面很光滑。 |
本帖最后由 湖湖 于 2022-6-5 18:44 编辑 curie 发表于 2022-6-5 16:07 那个跟伺服未必有关系~~~~~ 另外没刀纹 也挺扯淡的~~没刀纹 跟胡扯差不多~~~ 要求过高了~ |
湖湖 发表于 2022-6-5 09:02 机器已经装好在雕刻了,就是雕出来表面有些刀纹,所以在调试。 |
|
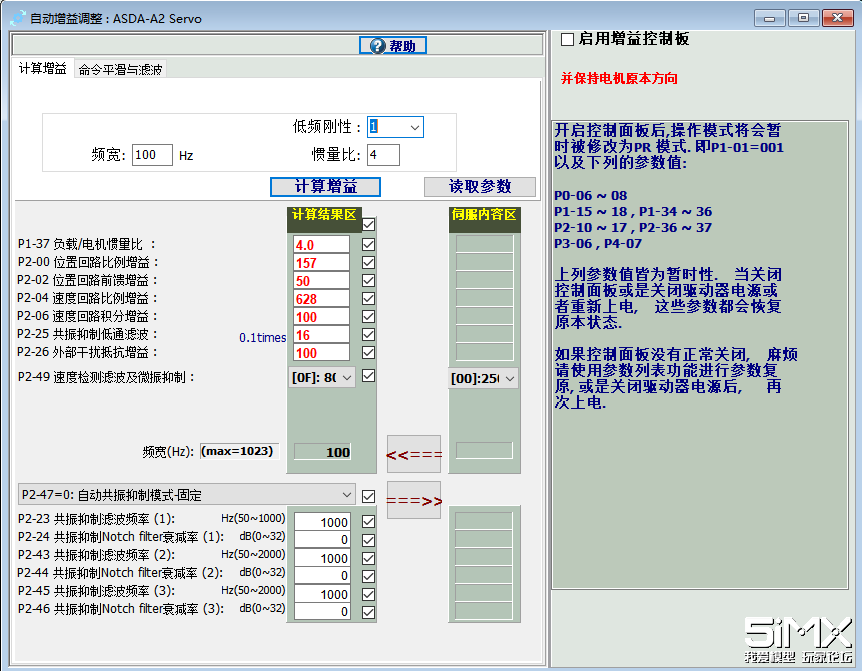
本帖最后由 304898582 于 2022-6-1 23:02 编辑 不同的安装环境、不同的负载惯量,惯量比、刚性参数是不同的,这个没有标准参数,厂家也没有办法给你合适的参数,只能按实际使用场合调整,自己实际调试实验下更容易明白,可以给伺服加上使能信号后,用手用力去转电机轴,先刚性、惯量参数给的很低,比如你是反向用力转,会发觉用手都可以转动电机轴,但是电机会有一个正向的力让轴归到原位,在增加点刚性、惯量参数,你会发觉用手转轴、电机本身的归位力矩更大了,这个刚性、惯量不是越大越好,刚性太大,会导致电机及驱动发热、电磁噪音大、电机抖动等,甚至会出现驱动报电机过电流故障;刚性越小,电机转动越平滑、安静、越不易抖动,但是会导致定位精度变低,最好状态,调到电机本身的力矩可以抵消外界施加反向的力后再加一点为好,使用伺服做精确定位场合,这几个参数调试的好与不好直接影响定位精度;(经常听到一句话,伺服调试好了、精度吊打步进电机,要调试的不好,精度都比不过最便宜的步进;其实说的就是这几个参数) 注意需要设置好刚性、惯量比后点击计算增益按键,在点击向右方向的那个箭头下载后参数才有效,我记着台达伺服带使能信号是没有办法下载参数的,需要下载参数时可以拔下编码器线后就可以下载,下载完断电,插编码器线后再上电调试,说了这么多、感觉我有点啰嗦了  |
 /1
/1 
 收藏
收藏