|
顶一个 |
|
牛人 |
|
多谢,受教了,如果用螺旋桨控制话,那螺旋桨的转速岂不是要周期性的提高降低,也就是说螺旋桨电机的电流要周期性的提高降低,那样的话对电机没有影响么? |
|
多谢,受教了,如果用螺旋桨控制话,那螺旋桨的转速岂不是要周期性的提高降低,也就是说螺旋桨电机的电流要周期性的提高降低,那样的话对电机没有影响么? |
|
本帖最后由 hzbunny 于 2014-3-13 01:33 编辑 http://www.engineeringtv.com/video/Samarai-UAV-Inspired-by-Maple-S/player?layout=&read_more=1 |
|
还有角速度传感器,可以即时测试角速度。 另外,这飞翼只有一个副翼,作用是作为升降舵使用,没有襟翼。从效率来说,利用副翼控制位移绝对没有螺旋桨拉力控制位移高。 不知道楼主有没有看过它那网站里的视频,其实说的很详细了。还有控制器的图片 
|
|
多谢,如果通过磁传感器可以得知飞行器的转速的话,那我想也可以通过舵机周期性的摆动襟翼来实现飞行器的前后移动。也可以实现摄像头画面的拾取。就是不知道有没有这样的高速周期摆动的舵机。不知道能应用于这样的磁传感器和舵机的价位是多少。除了用磁传感器来实现转速的获得的方法,还有什么其他的方法请高手告知。 |
|
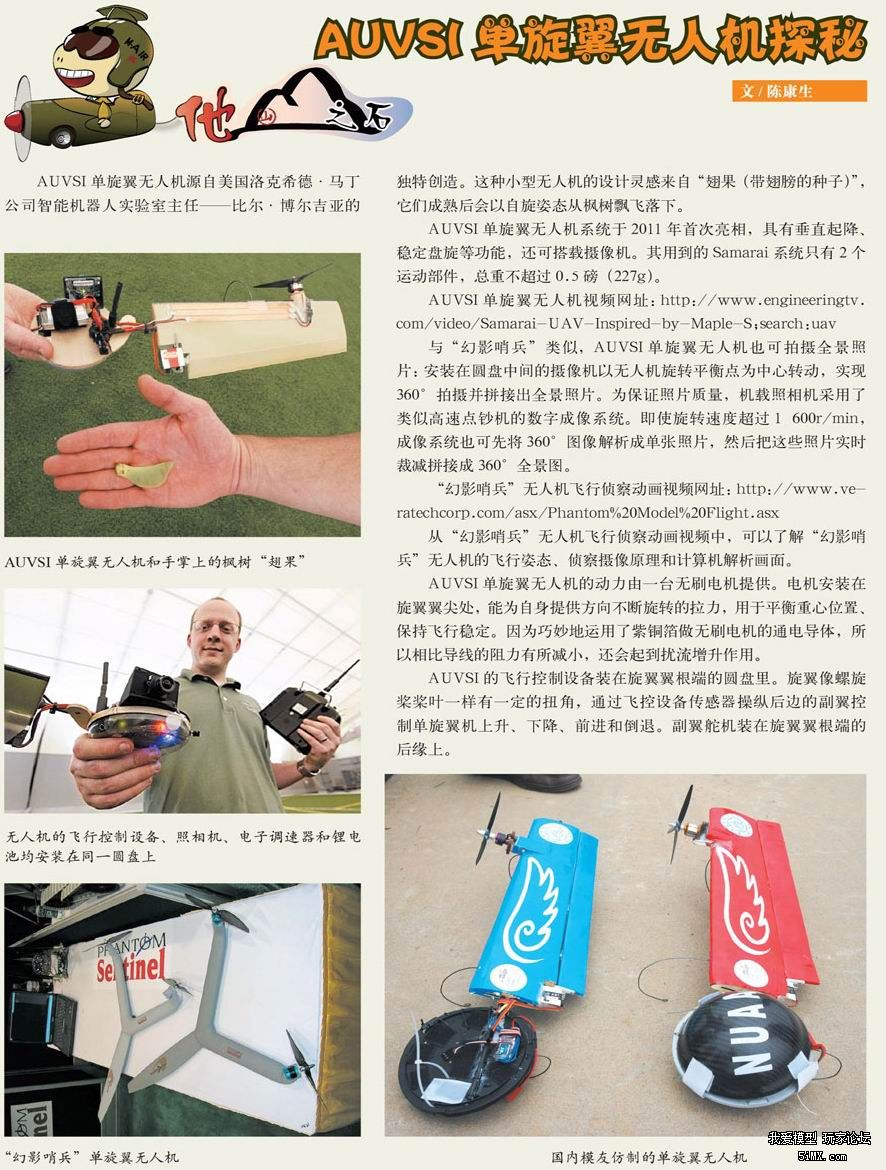
我觉得是通过周期性改变电机(螺旋桨)的转速来改变飞行方向的。 3轴陀螺传感器、3轴加速度传感器加上高灵敏的地磁传感器,飞翼可以知道某一ΔT电机所处角度,根据电机所处的不同角度,控制电机转速就可以特定角度的螺旋桨拉力。例如:(前提飞翼逆时针旋转)以地磁北极设为0度来说,如果飞翼要向东(地磁90度方向)移动,那么电机处在0度时转速最低,处在180度时转速最高,处在90度和270度时转速应该是折衷状态,主要是维持飞翼的升力。当然电机变速应该是周期性的,例子里的0度点转速最低、180度点转速最高。 这个硬件实现应该不难,仔细看的话,会发现飞翼的控制板上有2个高灵敏的磁传感器,利用它们的位置差,应该可以更高速和精确的计算飞翼的角度,然后根据当前角的3轴陀螺和3轴加速度传感器的数据,不难计算出角速度和移动速度等数据。问题的关键是软件里的控制算法。 这是我个人的理解,不敢说一定对。欢迎大家一起讨论 |
|
能具体说一下这两款飞行器的飞行原理么?他们是如何前后运动的?襟翼是如何工作的?多谢 |
csfighter 发表于 2014-3-3 18:30 无头模式就是没有头尾之分,飞行器前进和后退不受机头限制,只受地磁的影响 |
|
没人回答啊 ,到现在还没明白 |
del715 发表于 2014-3-2 22:17 什么是无头模式?能详细讲一下么?舵机怎样工作才能前后飞,还有摄像头是怎么实现的? |
你们真落后..我们伟大的第三帝国几十年前就玩过了.
|
|
本帖最后由 del715 于 2014-3-2 22:21 编辑 http://www.engineeringtv.com/vid ... -S;search%3Asamarai 其实也很好做,原理很简单,用无头模式控制左右前后找个支持全舵机的多轴飞控应该问题不大 |
 |
|
有没有视频啊,想看 |
|
有谁给详细的讲讲飞控原理呗,多谢 |
 /1
/1 
 收藏
收藏