|
发布时间: 2014-5-16 10:58
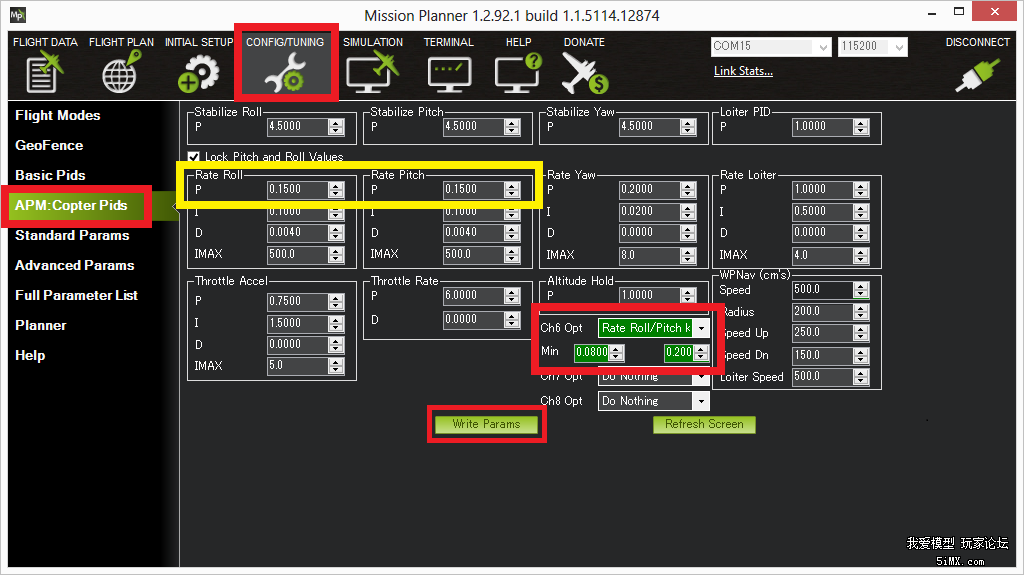
正文摘要:本帖最后由 周末影像 于 2014-5-17 09:20 编辑 因昨天自动调参后不满意,主要是加了负载后震荡,于是今天看了下官方网站,发现还有手动飞行中遥控调参的方式,分享一下,中午测试. 飞行中调整 Roll速率P和Pitch速 ... |
jpno1 发表于 2014-5-16 20:33 我在自动调参时出了问题,能否指点一下? http://bbs2.5imx.com/bbs/forum.php?mod=viewthread&tid=1132587 |
|
学习,以后使用 |
|
學習了,有空試試,謝謝了.好文 |
|
还有这个方法!必须顶,必须学。 |
|
为什么我一点刷新屏幕 最大值和最小值那里就归零了呢? |
|
好东西 |
|
话说APM的自动调参到底是带负载还是不带负载来进行? |
|
一直用默认参数飞的! |
|
先学习吧,我知道CC3D能行 |
|
新人学习了 |
|
温故而知新: § StabilizeRoll P和PitchP控制飞行器对于roll和pitch输入信号的响应速度,即飞行器操纵的跟手程度,以及实际与期望roll与pitch角之间的误差。 默认值是4.5,代表每存在1°的误差时,将以4.5°/秒的速度进行修正。 § P值越高,飞行器的修正与响应速度越快。 § 过高的P值将会导致飞行器前后震荡,类似于跷跷板似的动作。 § P值越低,飞行器的修正与响应就会越慢。 过低的P值将会当值飞行器反应缓慢,在有风的情况下甚至会导致坠机。 § Rate Roll/Pitch的 P,I ,D参数影响马达的输出,基于上述的自稳(角度)控制器期望的飞行器倾斜速率来控制。这些参数与飞行器的自身动力相关,动力较大的飞行器一般需要比较小的rate PID 值。 例如可以加速很快的飞行器可能适合的Rate Roll/Pitch P值是0.08,而加速比较缓慢的飞行器可能适合的值是0.18. § RateRoll/Pitch的P是调好飞行器的最重要的参数。 § 更高的P值意味着马达将以更大的响应以获得期望的转向速率。 § P的默认值是0.15,适合标准的Arducopter。 § RateRoll/Pitch的I是在外力作用使得飞行器无法长时间保持期望的速率时,用来补偿外力作用的的负效应的。 § 高I值会快速达到期望的速率,也可以在飞行器快速减慢避免飞过头。 § RateRoll/Pitch D 是用来抑制飞行器在加速修正至期望位置时的反应程度的。 § 过高的D值会导致飞行器出现异常震动与“记忆效应”,即飞行器控制缓慢反应迟钝。 § 根据模型的不同,取值一般在0.001与0.02之间 一起调才有意义...... |
zwdxbb 发表于 2014-5-16 11:10  泡泡,你被放出小黑屋啦 泡泡,你被放出小黑屋啦 |
|
调好了为什么还要重新输入呢?不是自动存? |
|
一定要顶起。 |
 |
真心感谢!学习了 |
|
这办法我用了,很好,可根据天气情况随时调整! |
 /1
/1 
 收藏
收藏
