欢迎继续阅读楼主其他信息
|
楼上正解,恢复默认,重新来过 |
|
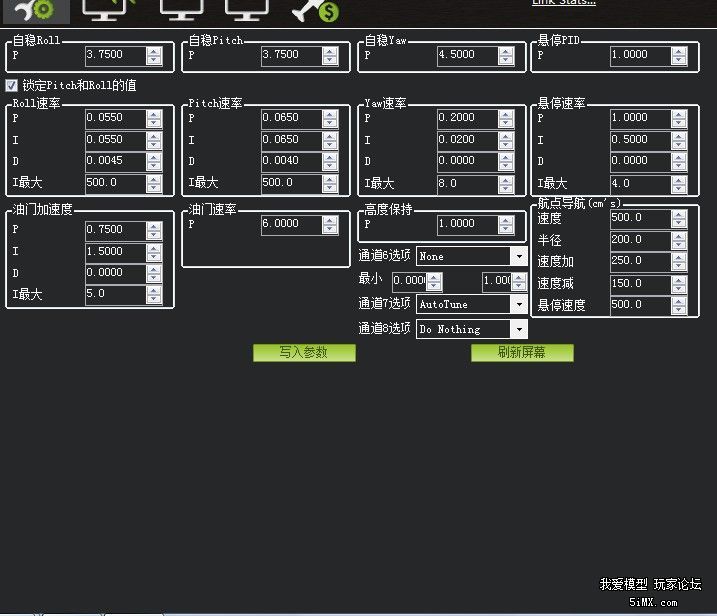
Pitch是俯仰,roll是横滚,yaw是方向,个人经验先调速率的p就已经能把机子调得很稳了 |
|
最上面一排,是基于位置误差的反馈环,表征误差修正力度;下面方框里描述词汇带速率的,是基于加速度的反馈环,表征误差修正的速率。上面一排的P越大,对位置误差的修正力度越强烈,下面的PID参数越大,误差转换成的加速度越大。 |
a12612603 发表于 2014-8-2 00:46 我连接着数传 |
|
因为你飞航点的时候,你的电脑没有连接数传,所以你电脑上的四轴是不动的。 |
 /2
/2 
 收藏
收藏

