|
2340| 24
|



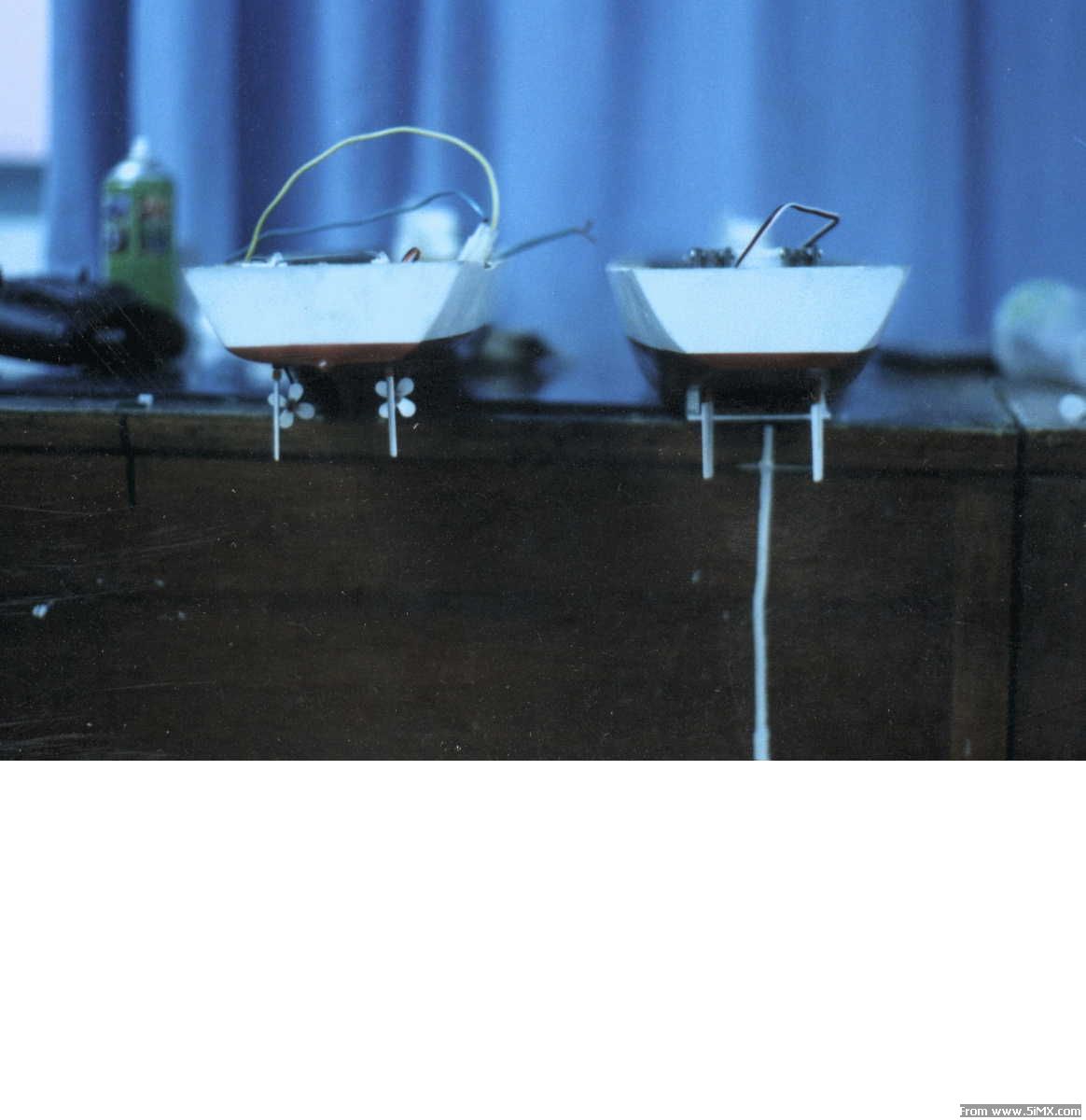
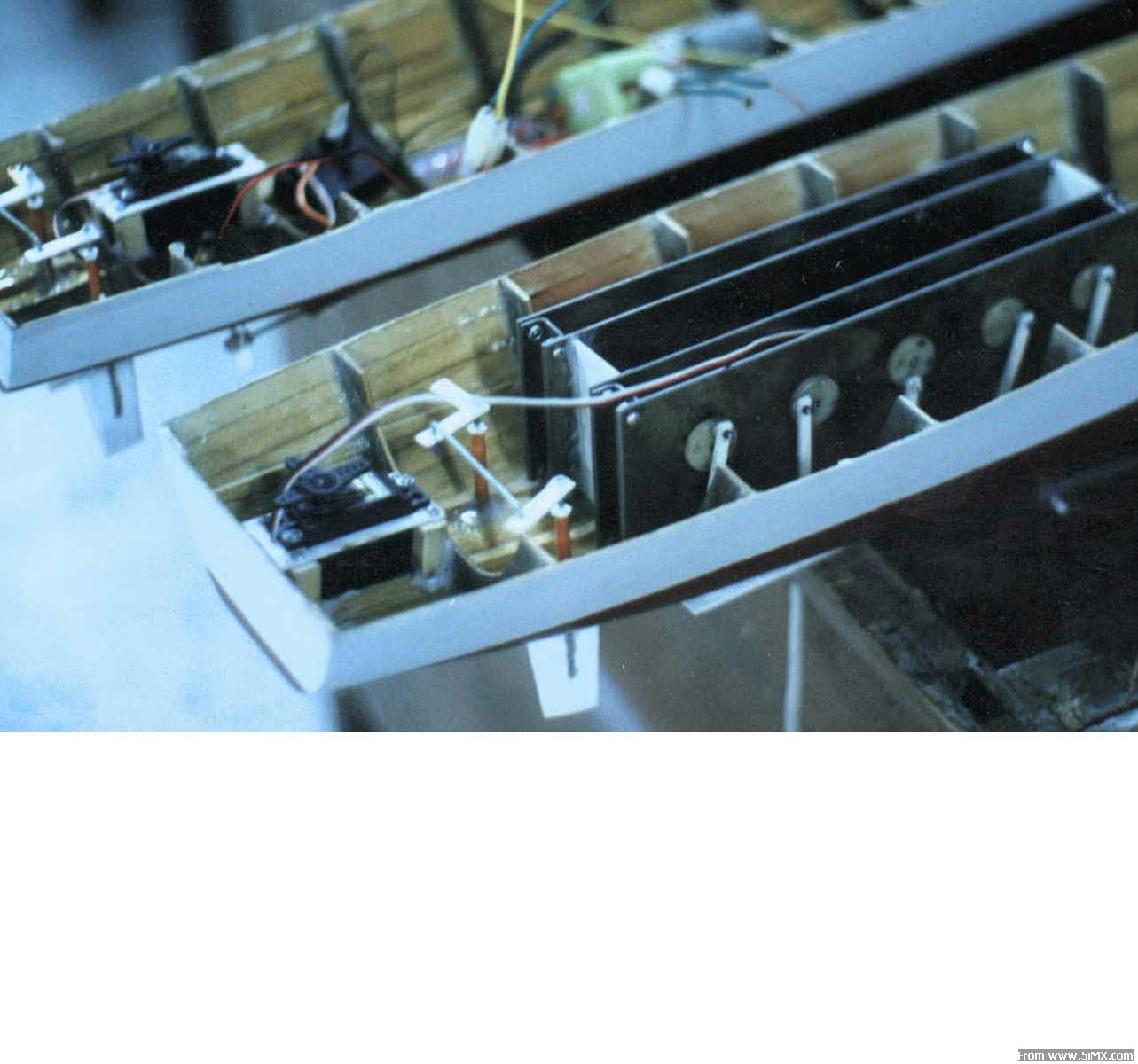
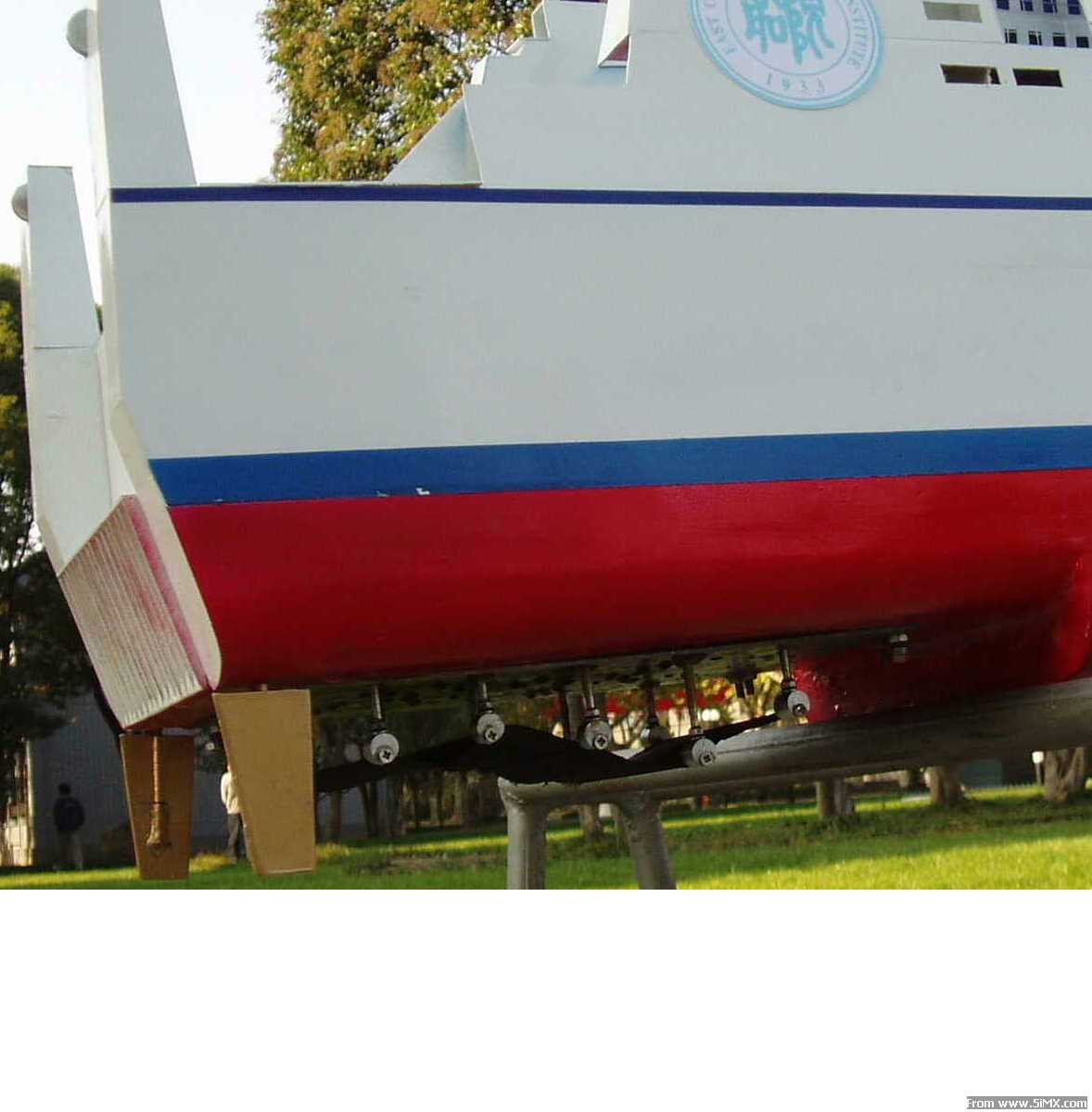
这就是我们在"挑战杯"上拿全国一等奖的作品-"仿生波动推进器" |
欢迎继续阅读楼主其他信息 | ||
这就是我们在"挑战杯"上拿全国一等奖的作品-"仿生波动推进器"
| ||
这就是我们在"挑战杯"上拿全国一等奖的作品-"仿生波动推进器"
| ||
这就是我们在"挑战杯"上拿全国一等奖的作品-"仿生波动推进器"
| ||
这就是我们在"挑战杯"上拿全国一等奖的作品-"仿生波动推进器"
| ||
这就是我们在"挑战杯"上拿全国一等奖的作品-"仿生波动推进器"
| ||
这就是我们在"挑战杯"上拿全国一等奖的作品-"仿生波动推进器"
| ||
这就是我们在"挑战杯"上拿全国一等奖的作品-"仿生波动推进器"
| ||
这就是我们在"挑战杯"上拿全国一等奖的作品-"仿生波动推进器"
| ||
这就是我们在"挑战杯"上拿全国一等奖的作品-"仿生波动推进器"
| ||
这就是我们在"挑战杯"上拿全国一等奖的作品-"仿生波动推进器"
| ||
这就是我们在"挑战杯"上拿全国一等奖的作品-"仿生波动推进器"
| ||
这就是我们在"挑战杯"上拿全国一等奖的作品-"仿生波动推进器"
| ||
这就是我们在"挑战杯"上拿全国一等奖的作品-"仿生波动推进器"
| ||
这就是我们在"挑战杯"上拿全国一等奖的作品-"仿生波动推进器"
| ||
这就是我们在"挑战杯"上拿全国一等奖的作品-"仿生波动推进器"
| ||
这就是我们在"挑战杯"上拿全国一等奖的作品-"仿生波动推进器"
| ||
这就是我们在"挑战杯"上拿全国一等奖的作品-"仿生波动推进器"
| ||
这就是我们在"挑战杯"上拿全国一等奖的作品-"仿生波动推进器"
| ||
这就是我们在"挑战杯"上拿全国一等奖的作品-"仿生波动推进器"
| ||
 /2
/2 



 发表于 2004-7-13 02:48
发表于 2004-7-13 02:48


 收藏
收藏 楼主
楼主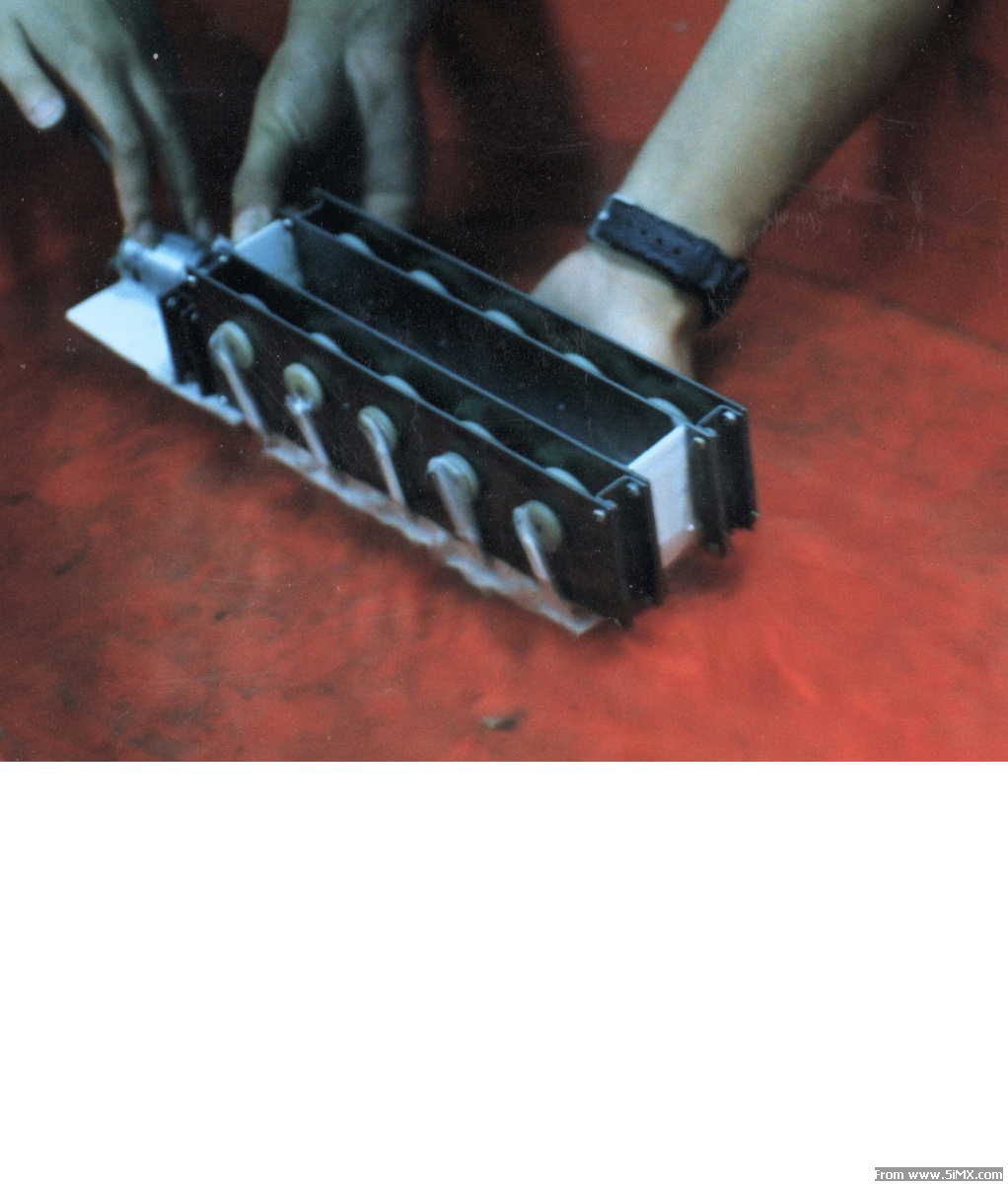





 发表于 2004-7-13 06:23
发表于 2004-7-13 06:23

