http://www.geocities.com/ilufa/DST_C.htm
模型飛機用數位式伺服機測試器 / 轉速計一雞四吃 Sep/06/2004
V3.10 功能不變,但將電變測試獨立出來,並將按鈕選擇重新定義,請注意看操作手冊。
原始碼再濃縮一次。在本網頁最底端增加 FAQ ,製作上有疑問的請 Email 給我。
----------------------------------------------------------------------------------------------------------------------------
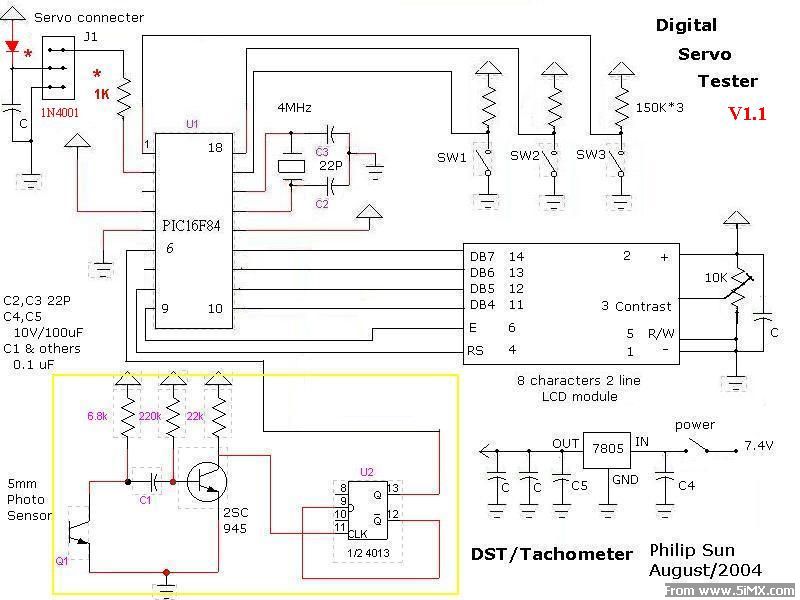
使用V3.0以上的韌體請注意: 電路上 PIC 的第 2 腳需多加一顆 1K 的保護電阻 (圖上紅色)。
-----------------------------------------------------------------------------------------------------
REC_T (receiver tester) 接收機測試
注意: 使用本功能請勿打開本機電源開關
電路上 PIC 的第 2 腳需多加一顆1K的保護電阻 (圖上紅色)。
本功能直接使用接收機的電源,測試時需使用特殊的雙母接頭連接線。白、紅、黑線,由上往下排列。
(雙母接頭連接線可用兩條一般 servo 的線對接而成)
功能: 顯示接收機送出的 PWM 脈衝寬度是否正常,發射機的搖桿是否正常。
Range: 10 uS ~ 25400 uS,超過 25400 uS 則顯示 25500 uS,表示有錯誤。
解析度 10 uS,誤差 +- 10 uS。
------------------------------------------------------------------------
LCD Tachometer 轉速計
Range 100 ~ 99900 RPM,解析度 100RPM。
誤差在 100 ~ 10000 RPM 為 +- 100RPM, 10000 ~ 99900 RPM 為 +- 1%。
目前只適合兩葉螺旋槳,多葉的螺旋槳需自己換算。
-------------------------------------------------------------------------
DST (Digital Servo Tester) : 數位式伺服機測試 V2
為全數位式設計,高準確度 +- 0.1%以內,分5種測試模式:
1. MANUAL mode
可在 1000~2000 uS 間自由調整 ,中立點為 1500uS。
2. SLOW test mode
由 1000 慢轉到 2000 約 10秒,自動反回,再自動重復 2次。
3. FAST test mode
在由 1000 快速跳到 2000, 0.5秒後自動跳躍,重復5次。
4. MID test mode V2.0
由 1000 慢轉到 2000 約 2秒,自動反回,再自動重復5次。
5. RANDOM test mode V2.0 --- 危險 --- 體質不良的伺服機可能會受不了
由亂數產生器決定位置,每隔約 0.3 秒跳一次,約跳30個點。
---------------------------------------------------------------------------------------
SCT (Speed Controller Tester) 電變測試 (有刷、無刷皆可)
注意: 使用本功能測試電變時,請勿打開本機電源開關
---------------------------------------------------------------------------------------
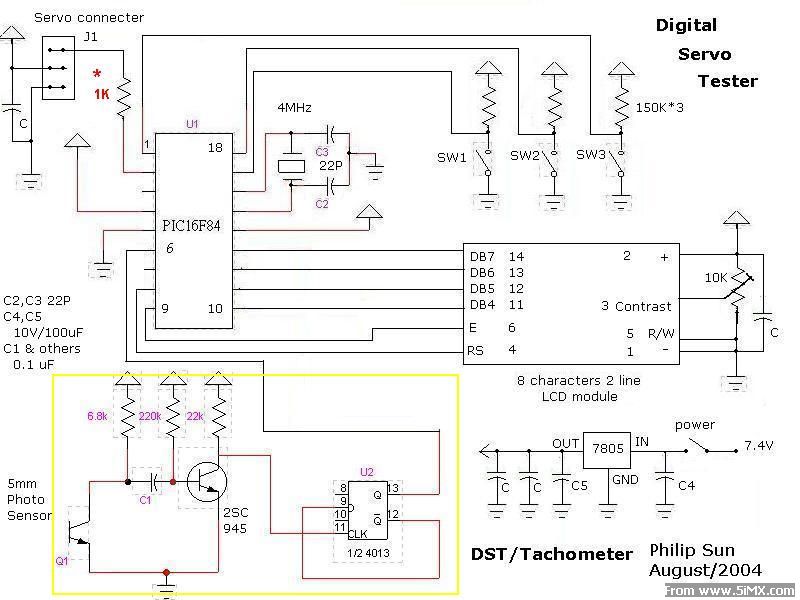
製作要領請參考本站的 " LED轉速計製作"。注意CD4013的 3,4,5,6,7,8,10腳要接地,每顆IC的電源要接一顆 0.1uF 的電容。光電晶體最好是 BPW77N,也可使用 L-51P3C 的編號。所有電阻為 1/8 W。
(BPW77N is a standard TO-18 hermetically sealed metal case. Its glass lens featuring a viewing angle of ±10 °)
燒錄 16F84A時,OSC= XT 勾 PWRT。
電路圖 DST.sch
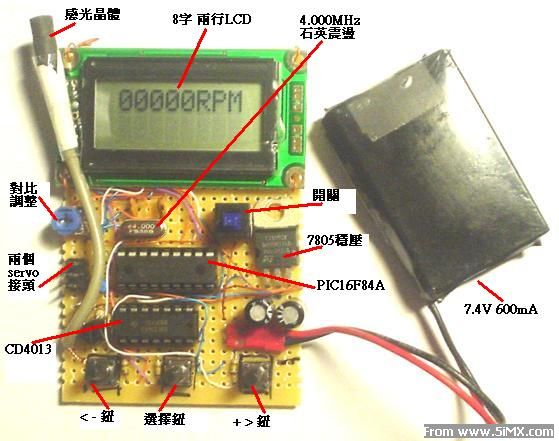
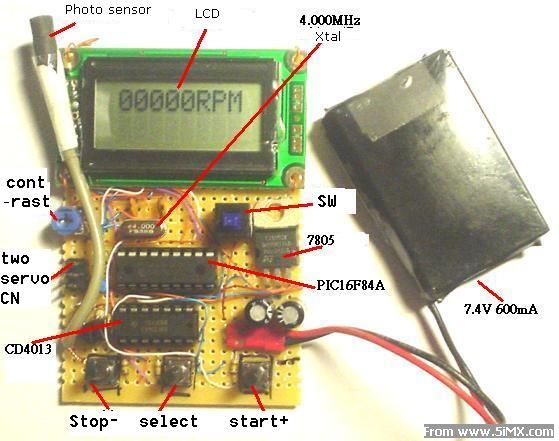
原型機圖片1 2 3
操作方法
FAQ:
1.買不到 5 mm 光電晶體,3 mm的可不可以用?
Ans: 3 mm的可以用,但你得用強光才測得到轉速。可見光的光電晶體又比紅外線的好。
2. 我用 5 mm 光電晶體,但測到的轉速很亂,也測不到日光燈的3600轉閃爍。
Ans: 儘量將光電晶體及2SC945那部份電路的線縮短,零件儘量靠近以避免電干擾。 (照片上的原型機,把光電晶體連接線拉長是容易受到干擾的,正確的排放請參考 LED 轉速計的光電晶體及2SC945位置 )
3. 使用上述方法改善很多了,但光線稍為弱一點就測不到了。
Ans: 可以將2SC945的集級電阻22K改用 30K 半可變電阻取代,再對著閃爍的光源或螺旋槳調整半可變電阻,有些CD4013 在電阻為 2K時最靈敏,但相對也最容易受到干擾。(TC4013 用22K 工作的很好)
4.可否加些 FET開關,由PIC來控制電源.....
Ans: 好主意。不過,留給商業版用吧。網路版以簡單好做為主。
5. 我是否可提出改善問題. 各子功能獨立 , 進入馬達偵測模式後 初始值是最低值 可防止無刷電變在偵測本身初始值參數 ,造成使用上問題 , 順便防止有刷電變會全速運轉暴衝 .
Ans: 好主意。我會試試看。結果為 V3.10 的誕生,謝謝飛友 "ysniwo" 的建議。
6. 光電晶體有三腳沒有二腳型...
Ans: 三腳通常比二腳型的好,可以用。使用三腳光電晶體時,B級不用接。
7. LCD顯示板找不到是否可提供型號及廠牌.
Ans: 我用的是WINSTAR的WH0802A。任何型號及廠牌都可以用,只要是"8字兩行"就可。接腳都一樣 ,只有大小不同 16*2 一樣會工作。
|



 /1
/1 



 发表于 2004-9-8 21:26
发表于 2004-9-8 21:26

 收藏
收藏 楼主
楼主