|
|
今天试飞了几次,锁尾算法还不错。不过飞行时间太短,所以还看不出长时间情况下效果如何。
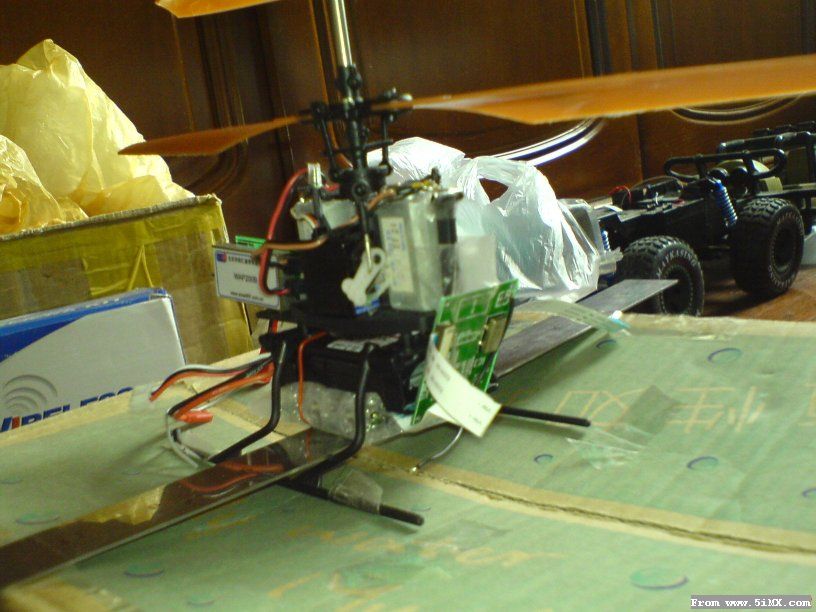
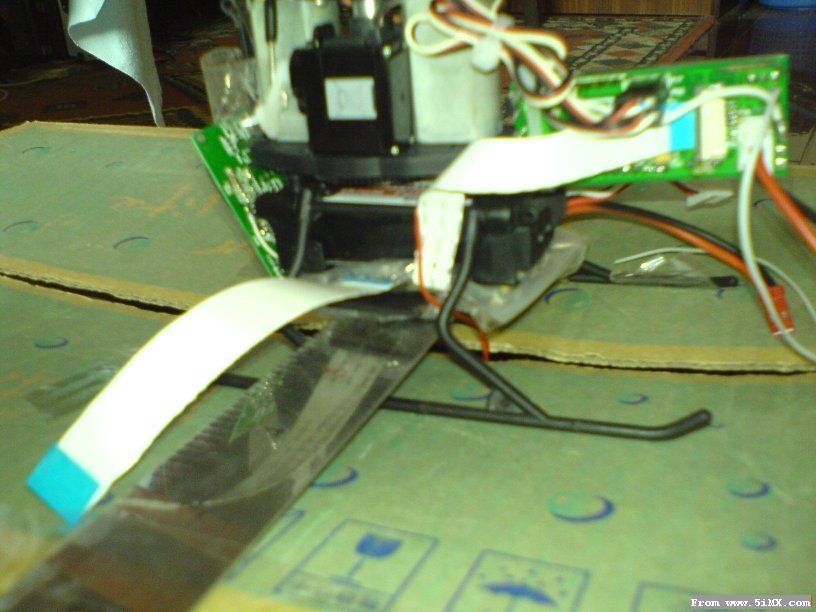
上个图片,原装LAMA和改装LAMA。

视频,方向控制还没做,所以冲着墙去了我一点招也没。
这是最后那个飞行片断的数据曲线。
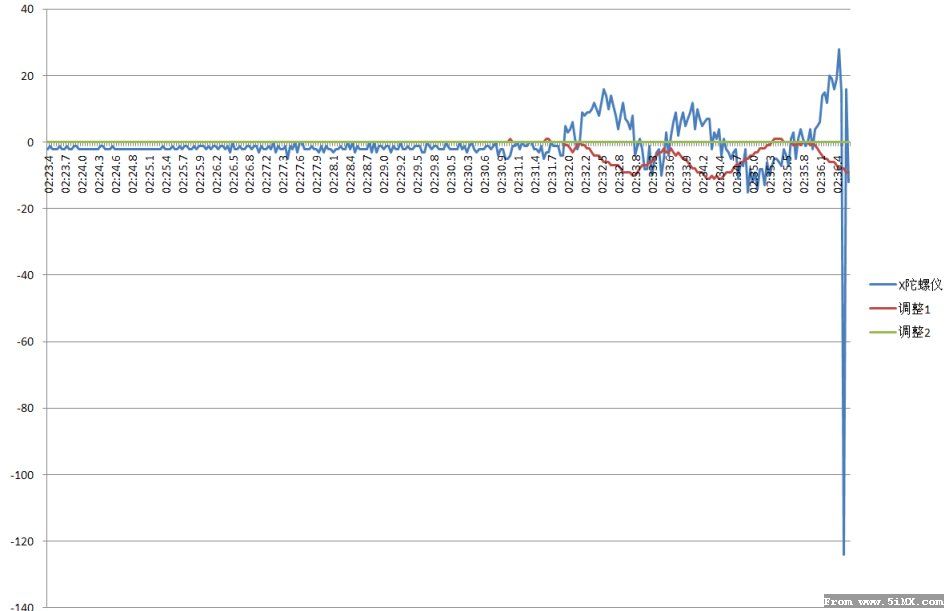
从录像里可以大概看出,锁尾还算稳定,虽然飞行时间不长,除了开始有个急速右转外,其余时间还算稳定。
没有完全采用PID,因为调整那些参数实在让人头大,还是使用玩具飞机上的算法,稍微调整了一下。
每次都有详细的飞行数据还真方便呢。
[ 本帖最后由 c_nmusic 于 2008-7-11 15:47 编辑 ] |
|



 /2
/2 


 楼主
楼主 发表于 2008-7-7 10:06
发表于 2008-7-7 10:06