7.
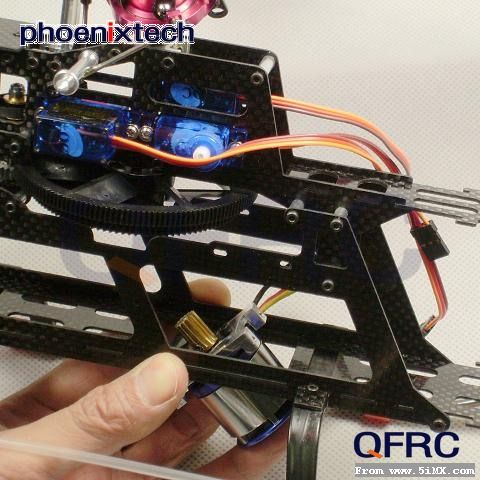
按照图上的方法把电机装入机架内
8.
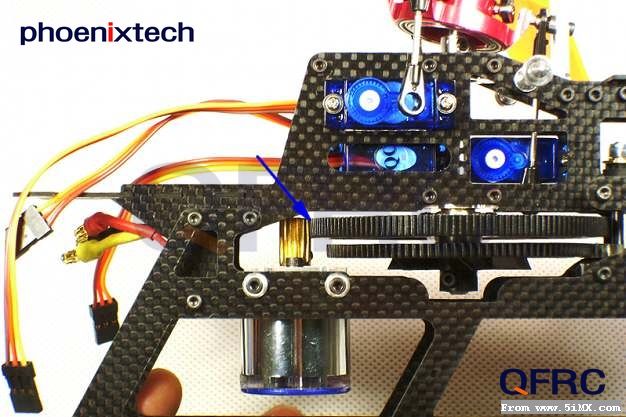
电机架就位后,观察一下大齿盘和铜齿的啮合情况,大齿和铜齿的上表面要平齐。安装到位后可以锁紧铜齿上的顶丝了。
9.
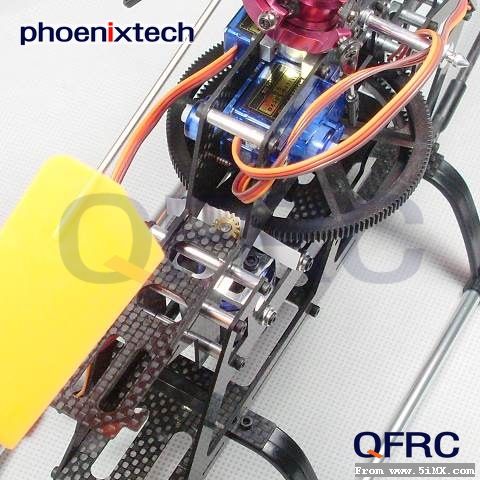
调整铜齿和大齿之间的啮合间隙,调整的方法可以剪一片普通的打印纸(60-70g的),放入两齿之间,靠紧两齿,在这个位置锁定安装架,把纸片旋出来,间隙就正好了。
10.

电调安装到位,电机的线先不要接。
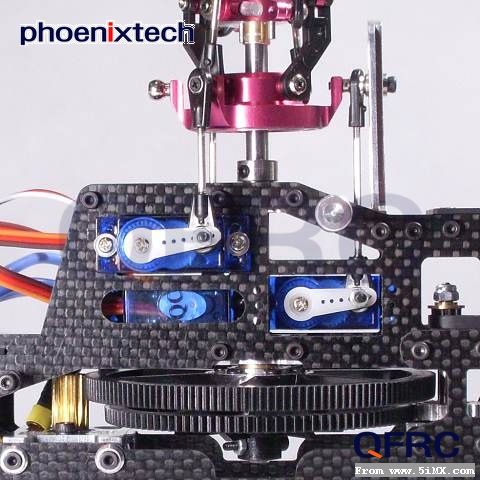
11.

选择好遥控器的模型类型(直升机)、斜盘类型(120度),所有参数复位,连接斜盘舵机到接收机,对于futuba兼容接收机,通道可以按下列方式连接:
A舵机——2通道
B舵机——1通道
C舵机——6通道
接通电源后,动一下摇杆测试舵机动作是否正确,如果斜盘动作混乱,把相应错误动作的舵机反向即可(按图上的连接方法,B舵机需要设置反向)。
摇杆置中(微调也要置中),此时舵机被置中了。(在舵机动作调正确前不要安装连接舵机的连杆)
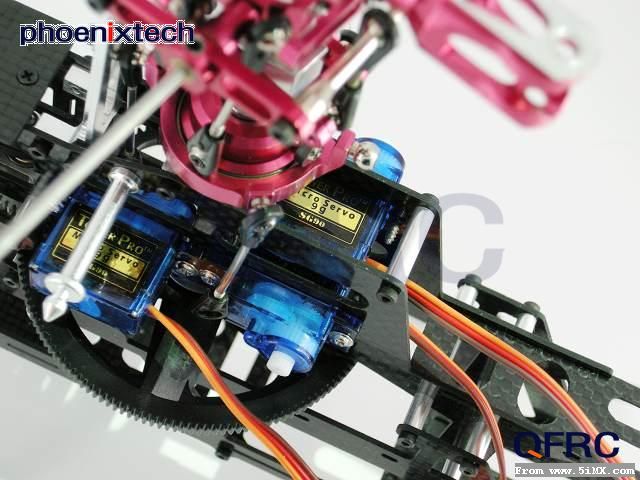
12.

在舵机中立位安装舵机摇臂,舵机摇臂要安装到最接近水平的位置(不太水平也不要担心,可以用发射机调至水平位置)。把舵机摇臂的螺丝紧上,紧螺丝时注意用手顶住摇臂,防止用力过猛损坏舵机。(如果连杆长度量取准确,舵机安装正确,十字盘就是接近水平的,如果不水平,相差大时,可以调整连杆长度,相差小时则可以用发射机调整相应舵机的中立点位置来修正)
至此,CCPM舵机就安装好了,但它们的设置工作还有一些,后面详说。
补充:如果你使用的是JR的设备,CCPM舵机连接方式为:
A舵机——3通道
B舵机——2通道
C舵机——6通道
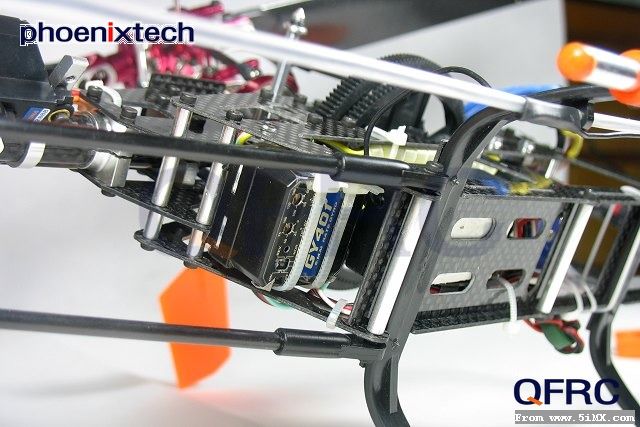
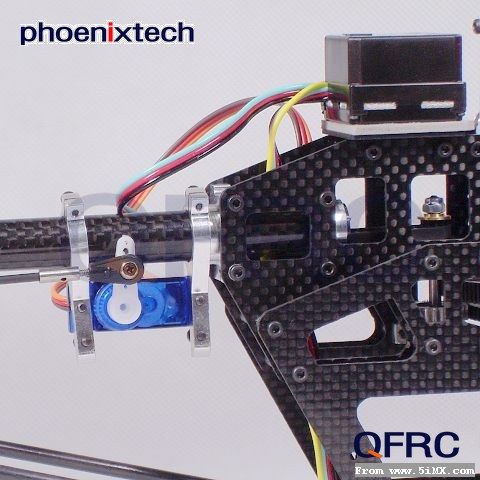
下面来安装控制尾旋翼的电子设备——陀螺仪、尾舵机
[ 本帖最后由 轻风TT 于 2008-4-17 00:07 编辑 ] |



 /2
/2 



 发表于 2008-4-17 00:05
发表于 2008-4-17 00:05







 收藏
收藏 楼主
楼主