|
|
遥控接收机输出信号模拟器
使用说明书
一 概述
本模拟器核心采用PIC系列单片机、产品的内核程序系独立开发。具有功耗低、可靠性高等特点。通过操作旋钮,拟器能产生和遥控接收机相同的信号,控制舵机或电调,并用发光二极管显示8位二进制信号宽度。可以用于需要模拟接收机信号的场合和对舵机或电调的有线遥控。
见下图 (图1)

二 技术参数
1.工作电压: DC4-5V
2.工作电流(电压5V): 4mA(指示灯全灭)--32.5mA(指示灯全亮)
3.信号分辨率: 8位(256级)
4.输出信号特性: 周期20ms 占空比 5%--10% 可调
5.重 量: 37克
6.外形尺寸: 60mm x 36mm x 16mm 长x宽x高(最高点)
三 各部分相关说明 见下图(图2)
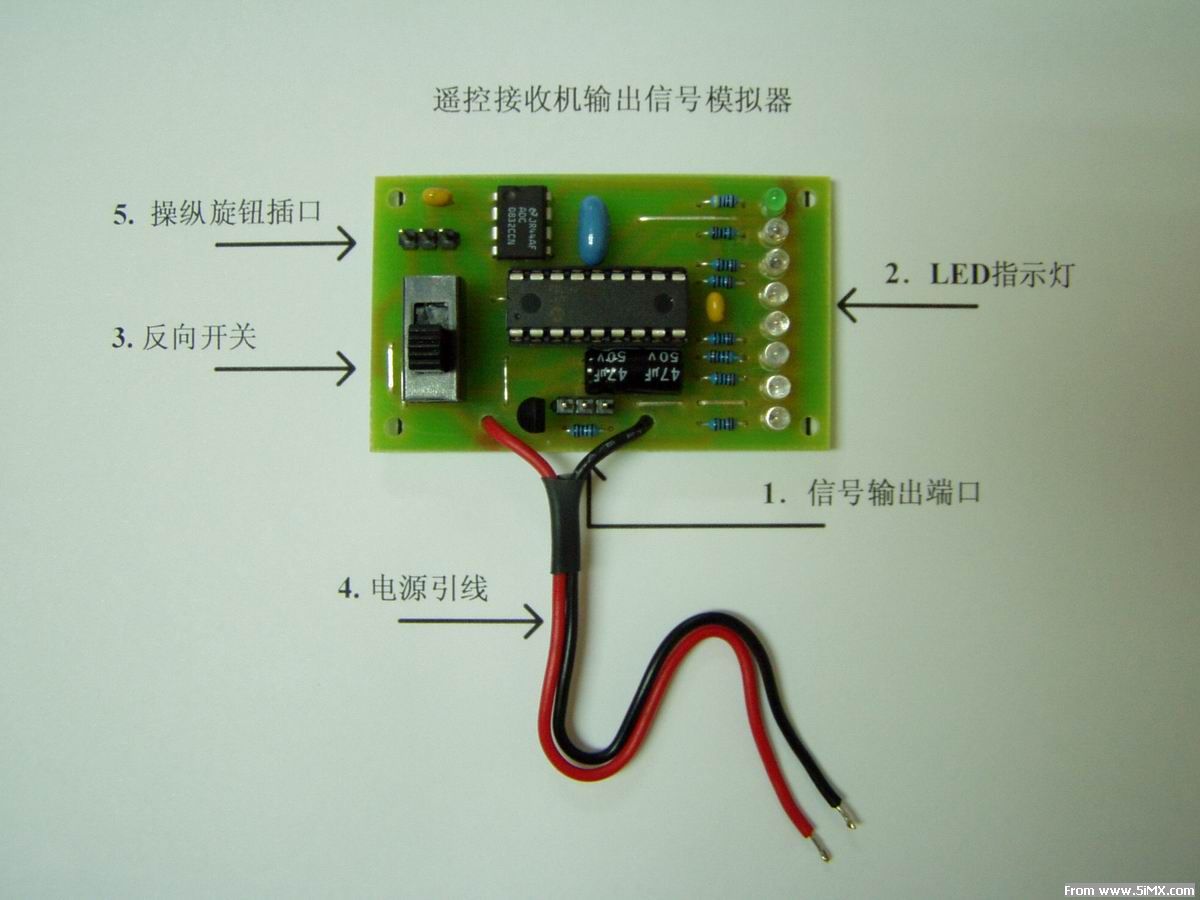
本模拟器分为输出部分和显示部分。
1. 信号输出端口(电路板中间下部)
输出与普通接收机相同特性的信号(详见篇末附件《接收机输出信号特性》),为标准的三芯插座,舵机的信号线可以直接插上,对于FUTABA的舵机白色线靠右插,JR则是棕色线靠右插。
2. LED指示灯(电路板右侧纵向一列8只)
用于显示输出脉冲信号高电平的宽度,从1ms -- 2ms,中间分为256等分(8位),全灭时表示1ms,相当于发射机操纵杆在底端时接收机输出的信号;转动旋钮到仅有绿灯亮时表示1.5ms中间值,此时舵机的输出臂在中点位置,相当于发射机操纵杆回中时接收机输出的信号;全亮时表示2ms,相当于发射机操纵杆在顶端时接收机输出的信号。该指示灯以二进制的方式显示,最高位为绿色,从高到低每个LED分别代表:128、64、32、16、8、4、2、1。您可参考8位二进制的相关介绍。
3. 反向开关(电路板左侧)
改变输出信号的方向,作用相当于发射机上的反向开关。
4. 电源引线(电路板中下部)
红色为正,黑色为负。电压范围4-5V。
5. 操纵旋钮插口(电路板左侧上部)
操纵模拟器的输出信号的电位器插口。
★ 色标说明
输出口上,按FUTABA色标由左到右分别为:W白色(信号)、R红色(电源+)、B黑色(电源-)。JR的也可以直接插,与FUTABA颜色对应为: FUTABA JR
W白色(信号) 橙色
R红色(电源+) 红色
B黑色(电源-) 棕色或褐色
四 与舵机的连接 见下图(图3)
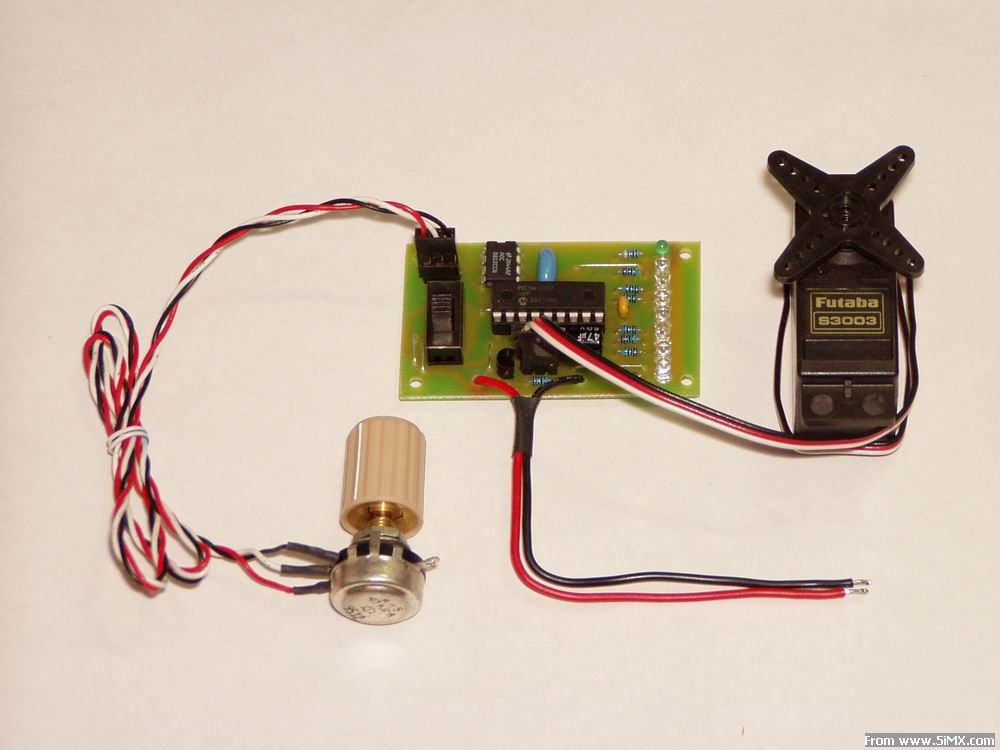
五 使用方法
按图3把舵机 接在模拟器上,接通电源,转动旋钮,舵机将作相应的动作,若方向相反则通过反向开关校正。若用来控制电调,其接法与舵机相同,不在复述。
六 服务
您在使用中对本模拟器有何建议和意见请告诉我,我将提供全面的技术支持和售后服务。
联系人:徐庆宇
电 话:023-60674664
传 真:023-63634757
Email: xqy58692@sohu.com
附件:
接收机输出信号特性
四通道T4VF型发射机配R136F接收机输出PWM信号参数
a. 周 期:20ms
b. 占空比: 5% -- 10% (高电平宽度:1.0ms -- 2.0ms )
c. 中 点: 7.5% (高电平时间:1.5ms)
以上参数会因发射机和接收机的不同略有差异。
有需要的模友请在交易区看公开报价,或短信报价. |
欢迎继续阅读楼主其他信息
|



 /1
/1 



 发表于 2005-7-27 14:36
发表于 2005-7-27 14:36

 收藏
收藏 楼主
楼主